

 Find content
Find content Male
Male









 Posted by
Posted by If so,i can port it from my board to Netduino,and here's the sample code how to use the CAN bus in .Net Micro Framework.
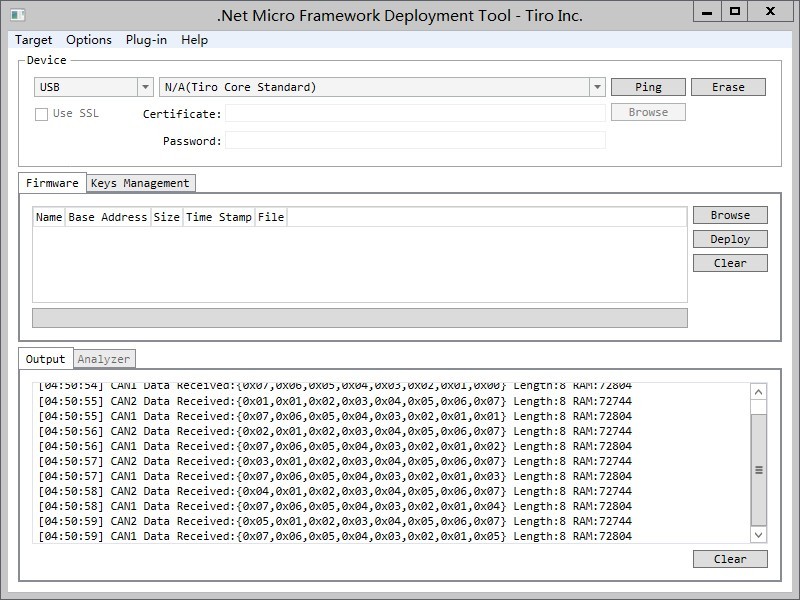
using System;using System.IO;using System.IO.Ports;using System.Text;using System.Threading;using System.Collections;using Microsoft.SPOT;using Microsoft.SPOT.IO;using Microsoft.SPOT.Hardware;using TiroCore.SPOT.Hardware;namespace CAN_Bus{ public class Program { public static void Main() { //This static function must to be called once before usage CAN.Initialize(); #region CAN1_Configuration //Create the configuration for CAN at speed 1 Mbps CAN.Configuration _CAN_Configuration_CAN1 = new CAN.Configuration() { Prescaler = 2, Mode = CAN.CAN_Mode.Normal, SJW = CAN.CAN_TimeQuantum.TimeQuantum1, BS1 = CAN.CAN_TimeQuantum.TimeQuantum8, BS2 = CAN.CAN_TimeQuantum.TimeQuantum12, TTCM = false, ABOM = false, NART = false, RFLM = false, TXFP = false }; //Create the filter configuration for CAN CAN.FilterConfiguration _CAN_FilterConfiguration_CAN1 = new CAN.FilterConfiguration() { Number = 0, Mode = CAN.CAN_FilterMode.IdMask, FIFO = CAN.CAN_FIFO.FIFO0, Scale = CAN.CAN_FilterScale.FilterScale_32Bit, IdHeigh = 0x0000, IdLow = 0x0000, MaskHeigh = 0x0000, MaskLow = 0x0000, Activation = true }; //Create the reusable transmit message for CAN CAN.Message _CAN_Message_Transmit_CAN1 = new CAN.Message() { StandardId = 0x321, ExtendedId = 0x01, RTR = CAN.CAN_RemoteTransmissionRequest.Data, IDE = CAN.CAN_IdentifierType.Standard, DLC = 8, Data = new byte[] { 0x00, 0x01, 0x02, 0x03, 0x04, 0x05, 0x06, 0x07 } }; //Create the CAN bus CAN _CAN_CAN1 = new CAN(CAN.CAN_Device.CAN1, _CAN_Configuration_CAN1); //Binding the receive event to the CAN bus _CAN_CAN1.OnReceive += CAN_OnReceive; //Open the CAN bus _CAN_CAN1.Open(); //Set the filter configuration _CAN_CAN1.SetFilter(_CAN_FilterConfiguration_CAN1); //Enable FIFO0 receive interrupt for CAN bus _CAN_CAN1.SetInterruptState(CAN.CAN_Interrupt.FMP0, true); #endregion #region CAN2_Configuration //Create the configuration for CAN at speed 1 Mbps CAN.Configuration _CAN_Configuration_CAN2 = new CAN.Configuration() { Prescaler = 2, Mode = CAN.CAN_Mode.Normal, SJW = CAN.CAN_TimeQuantum.TimeQuantum1, BS1 = CAN.CAN_TimeQuantum.TimeQuantum8, BS2 = CAN.CAN_TimeQuantum.TimeQuantum12, TTCM = false, ABOM = false, NART = false, RFLM = false, TXFP = false }; //Create the filter configuration for CAN CAN.FilterConfiguration _CAN_FilterConfiguration_CAN2 = new CAN.FilterConfiguration() { Number = 14, Mode = CAN.CAN_FilterMode.IdMask, FIFO = CAN.CAN_FIFO.FIFO0, Scale = CAN.CAN_FilterScale.FilterScale_32Bit, IdHeigh = 0x0000, IdLow = 0x0000, MaskHeigh = 0x0000, MaskLow = 0x0000, Activation = true }; //Create the reusable transmit message for CAN CAN.Message _CAN_Message_Transmit_CAN2 = new CAN.Message() { StandardId = 0x123, ExtendedId = 0x01, RTR = CAN.CAN_RemoteTransmissionRequest.Data, IDE = CAN.CAN_IdentifierType.Standard, DLC = 8, Data = new byte[] { 0x07, 0x06, 0x05, 0x04, 0x03, 0x02, 0x01, 0x00 } }; //Create the CAN bus CAN _CAN_CAN2 = new CAN(CAN.CAN_Device.CAN2, _CAN_Configuration_CAN2); //Binding the receive event to the CAN bus _CAN_CAN2.OnReceive += CAN_OnReceive; //Open the CAN bus _CAN_CAN2.Open(); //Set the filter configuration _CAN_CAN2.SetFilter(_CAN_FilterConfiguration_CAN2); //Enable FIFO0 receive interrupt for CAN bus _CAN_CAN2.SetInterruptState(CAN.CAN_Interrupt.FMP0, true); #endregion while (true) { _CAN_CAN1.Transmit(_CAN_Message_Transmit_CAN1); _CAN_CAN2.Transmit(_CAN_Message_Transmit_CAN2); _CAN_Message_Transmit_CAN1.Data[0]++; _CAN_Message_Transmit_CAN2.Data[7]++; Thread.Sleep(1000); } } static void CAN_OnReceive(CAN.InterruptEventArgs args, DateTime time) { if (args.Message != null) { Debug.Print("CAN" + (args.CAN.Device + 1).ToString() + " Data Received:" + "{" + "0x" + args.Message.Data[0].ToString("X2") + "," + "0x" + args.Message.Data[1].ToString("X2") + "," + "0x" + args.Message.Data[2].ToString("X2") + "," + "0x" + args.Message.Data[3].ToString("X2") + "," + "0x" + args.Message.Data[4].ToString("X2") + "," + "0x" + args.Message.Data[5].ToString("X2") + "," + "0x" + args.Message.Data[6].ToString("X2") + "," + "0x" + args.Message.Data[7].ToString("X2") + "} Length:" + args.Message.DLC.ToString() + " RAM:" + Debug.GC(false).ToString()); } } }}Attached Files
-
 QQ??20131119165105.jpg 135.57KB
2 downloads
QQ??20131119165105.jpg 135.57KB
2 downloads
- blackt1ger likes this


