Posted by
Posted by
@sweetlilmre:
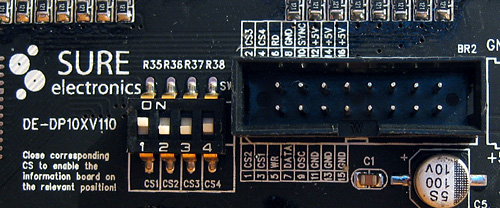
I don't think there's need to implement the chip-select manually. The SPI manages an output automatically without any problem and the result is much faster than the manual solution.
Try yourself and maybe your ball game will run at a satisfying speed.
Cheers
Hi
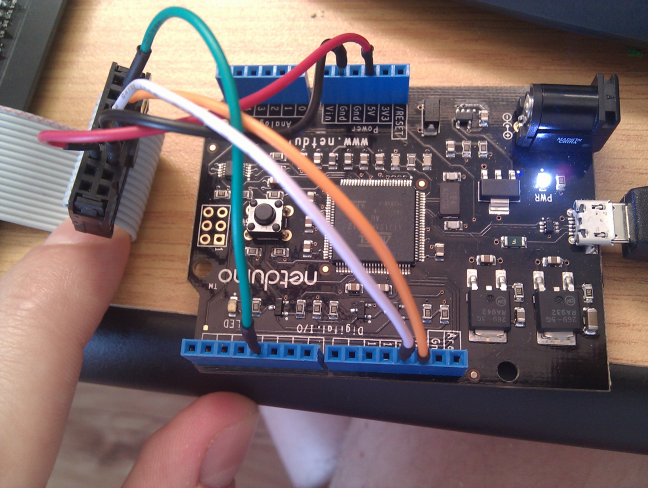
In my code there are only 2 SPI writes per frame so the independent chip select doesn't make any difference.
I rewrote the code as a test to flush the entire 32KB of data per frame with SPI handling the select.
This also made no difference.
I'll try some more options, but it seems the NetDuino running C# is just not fast enough to handle this

-(e)
 I just got one today that I would like to start playing with soon. Or just post the code and I'll convert it?
I just got one today that I would like to start playing with soon. Or just post the code and I'll convert it?