Find content
Find content Not Telling
Not Telling
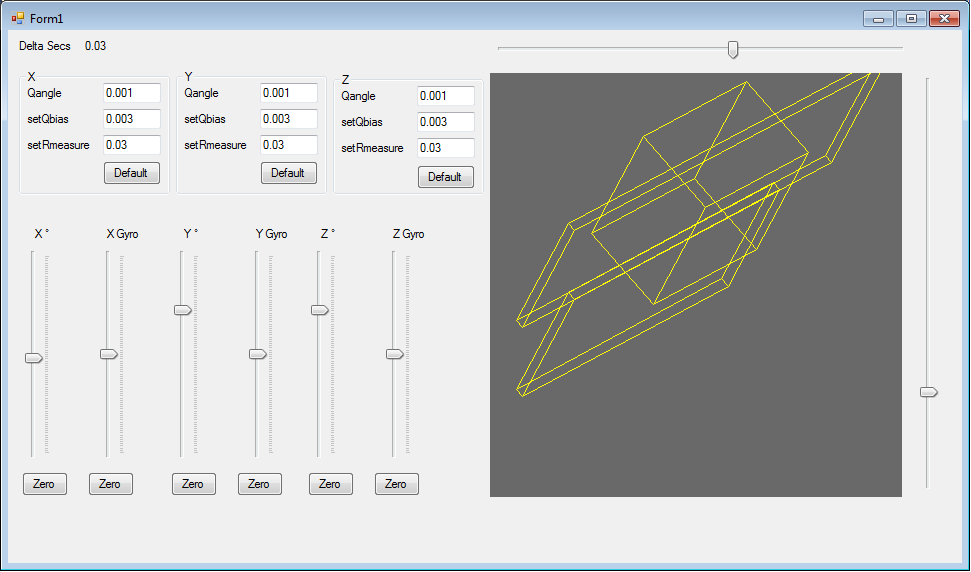
A variation on a simple web server I found on line. A friend of mine wanted a simple demo as a start point for a .NET WWW project
You can bridge www to serial, flash the led, set digital outputs and set 4 servo positions
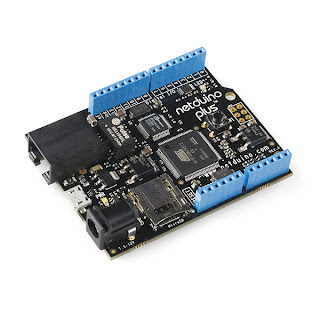
[color=rgb(0,0,0);font-family:monospace;font-size:13px;]This is a wee web server which allows reading and writing to Netduino hardware[/color]
[color=rgb(0,0,0);font-family:monospace;font-size:13px;]there is an index page[/color]
[color=rgb(0,0,0);font-family:monospace;font-size:13px;]http://ipaddress/index.htm[/color]
[color=rgb(0,0,0);font-family:monospace;font-size:13px;]COMMANDS[/color]
[color=rgb(0,0,0);font-family:monospace;font-size:13px;]http://ipaddress/?led=0[/color]
[color=rgb(0,0,0);font-family:monospace;font-size:13px;]http://ipaddress/?led=1[/color]
[color=rgb(0,0,0);font-family:monospace;font-size:13px;]Digital outputs on and off dout is the output number 0 to 3 state is 0 or 1 pind 0,1,2,3[/color]
[color=rgb(0,0,0);font-family:monospace;font-size:13px;]http://ipaddress/?dout=0&state=1[/color]
[color=rgb(0,0,0);font-family:monospace;font-size:13px;]http://ipaddress/?dout=0&state=0[/color]
[color=rgb(0,0,0);font-family:monospace;font-size:13px;]read 4 analogue inputs[/color]
[color=rgb(0,0,0);font-family:monospace;font-size:13px;]http://ipaddress/?anin[/color]
[color=rgb(0,0,0);font-family:monospace;font-size:13px;]set 4 PWM outputs pins 5,6,8,9[/color]
[color=rgb(0,0,0);font-family:monospace;font-size:13px;]http://ipaddress/?pwm=0&pos=1750[/color]
[color=rgb(0,0,0);font-family:monospace;font-size:13px;]Send serial data where werty is the string that is sent[/color]
[color=rgb(0,0,0);font-family:monospace;font-size:13px;]http://ipaddress/?serial=qwery[/color]
[color=rgb(0,0,0);font-family:monospace;font-size:13px;]COSM data[/color]
[color=rgb(0,0,0);font-family:monospace;font-size:13px;]https://cosm.com/users/nickatrdbox#[/color]
Source code