Posted by
Posted by
Hi entropi (and others attending MIX11),
Please stop and say hi!
Chris
Ha ... I was at NAB at the same time, I didn't know about MIX until after the fact.
Maybe some other time Chris.
Any videos of whatever you did there?
|
||||||||||||||
FelixEmman's ContentThere have been 25 items by FelixEmman (Search limited from 16-July 24) #12223 MIX11
Ha ... I was at NAB at the same time, I didn't know about MIX until after the fact. Maybe some other time Chris. Any videos of whatever you did there? #12222 Simple multi-threaded web server
Jasper,
I haven't tried your server yet -I don't have my N+ available now- but I see you use a single thread in your webserver.
I've seen a few other webservers in the Netduino forums and while they are threaded, they can't handle many repeated requests. I really wish I has the time to attempt to code a webserver that spans new listener threads as more requests come in, but right now my focus is in other areas, so I'm just keeping an eye in the projects forum and webservers are always an interesting topic.
The problem is that these small webservers can handle gracefully as long as you don't abuse them. Once you start submitting requests quickly, they choke and exception out with socket exceptions.
So this is really intended to be just a suggestion or a future improvement idea, nothing else.
Thanks for the contribution.
#11636 Updated web server
Fred,
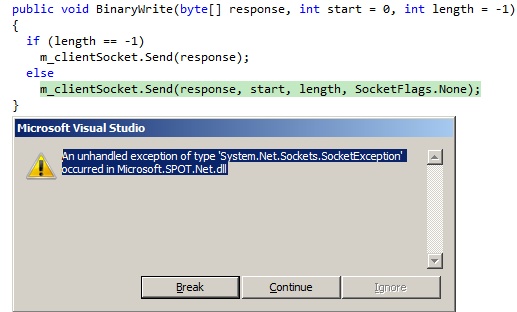
I did try your webserver and I did notice that trying a request while another is still serving, will throw a socket exception and crash it. See this post for more details. I think it's because the webserver is single threaded. It's true that there's a single core, but remember, any real webserver is threaded or able to handle many requests at once. And most useful applications have to make use of threading in order to provide a smooth user experience. So if you make improvements I would encourage threading your webserver. If you have time and want to get fancy, see Quiche31's implementation http for ideas. I think it's rather SLOW compared to yours, but he handles the request a bit more gracefully. #11635 Problem(s) compiling NetduinoPlus firmware with GCC
Mario,
I had the same problem with GCC. I wanted to add a firmware feature to the N+ code, and after lots of frustration with making it even compile, I realized that I had to build with tcpip_stack=lwip to be able to use the ethernet. That ended in disappointment because the binaries produced by GCC were now way over the capacity, so I went ahead and tried what you did, strip the Ferrari's engine, brakes, suspension and gearbox, hoping it will work. I was too optimistic. Conclusion: GCC might work, but I lost my patience. The real issue is that currently the 512Kb of flash is by all means a BIG flash, but when you're trying to run .NET in a nutshell on that 512kb, you can't expect much. So a bigger flash would be the first improvement that would make a difference for those who want to hack. Right now the stock N+ firmware enables 64kb of free space, which is GOOD. But it's really pushing the limits when it comes to adding new features to N+, so unless Secret Labs will revision with a new CPU with more flash/RAM, I think they'll run out of flash pretty soon, even using RVDS. Let's keep the fingers X-ed for that to happen sooner ;-)
#11237 Pachube client for NetduinoPlus
Quiche31,
Nice job with the HTTP lib, however the webserver chokes if I refresh the repeatedly (ie refresh before a response is fully received), see attached for the exception. Any ideas how that could be solved? I saw you define a backlog of 10 when you new up the HttpSocketImpl: m_listeningSocket.Listen(10);but maybe that doesn't help? I think you based your listener on Fred's nonblocking webserver (http://forums.netdui...ted-web-server/), which by the way has the same issue. I haven't tried any changes to your code but what if the webserver was threaded? Attached Thumbnails#10984 Ethernet and SD won't work when building with GCC 4.2.1
Has anyone had problems with the Ethernet and SD when building NetduinoPlus with GCC?
I used GCC 4.2.1 to build the latest code available (4.1.0.update6). I loaded the TinyBooterDecompressor via samba (the one available here in the forum) because of its small size. Then I used MFDeploy to upload ER_CONFIG and ER_FLASH produced by GCC. Blinking the LED works. However the network and SD do not work. If I try this: var interface = NetworkInterface.GetAllNetworkInterfaces()[0]; I get this exception: An unhandled exception of type 'System.IndexOutOfRangeException' occurred in Netduino1stApp.exe #### Exception System.IndexOutOfRangeException - 0xa9000000 (1) #### #### Message: #### Netduino.Program::Main [IP: 0005] #### A first chance exception of type 'System.IndexOutOfRangeException' occurred in Netduino1stApp.exe An unhandled exception of type 'System.IndexOutOfRangeException' occurred in Netduino1stApp.exe Also if I try this: if (File.Exists(@"\SD\sample.bmp")) Debug.Print("Exists!");
I get this exception: An unhandled exception of type 'System.IndexOutOfRangeException' occurred in Netduino1stApp.exe #### Exception System.IO.IOException - CLR_E_INVALID_DRIVER (1) #### #### Message: #### Microsoft.SPOT.IO.NativeIO::GetAttributes [IP: 0000] #### #### System.IO.File::Exists [IP: 001a] #### #### Netduino.Program::Main [IP: 0010] #### A first chance exception of type 'System.IO.IOException' occurred in Microsoft.SPOT.IO.dll If I load the stock 4.1.0.6 firmware available in the forum, everything works, and these 2 lines of code return the expected result. #10494 DHCP doesn't work
Chris,
I updated my router's firmware to the latest firmware yesterday (after the first unsuccessful attempts to get the netduino on the network). At that point DHCP started working, but like I said netduino was vanishing a few minutes into the connection. Weird, to say the least! So today I started looking at wireshark DHCP captures but could not find anything abnormal. However I noticed that if I connected any of my computers with a cable to the router, DHCP would not respond to DHCP discovers, and they could not get on the network! So after a lot of frustration, I decided to revert to the old router firmware. After the downgrade everything works... netduino is on DHCP, alive and well after long periods. The other computers' DHCP works fine as well. So the new firmware was a fiasco. Conclusion: 1) DHCP seems to work ok on the netduino now 2) Don't buy Belkin products again I am curious how the netduino will behave when the DHCP lease expires. Have you run into this situation? Will it try to renew? #10471 DHCP doesn't work
Hey Chris, Yes, I upgraded to 4.1.0.6 which you posted today - 3/1. Hm, I think I had the settings set to something other than 0s. I cleared the StaticIP/Subnet/Gateway/DNS1/DNS2 all to 0s. That will make it work. BUT, after just a few minutes, it is no longer in the DHCP list of the router, and pinging times out. So it drops from the network. Not sure if the router has anything to do with this or not, but I'd expect the lease to be longer, since my router's DHCP lease is set to "forever". The same happens when I set the IP statically, it works ok for a few minutes, then it vanishes from the network... #10469 DHCP doesn't work
I'm having the same issue, DHCP doesn't work.
I setup my MAC as it's on the netduino sticker, and checked "DHCP" in MFDeploy-Config-Network. I get a "0.0.0.0" from NetworkInterface.GetAllNetworkInterfaces()[0].IPAddress.
However, if I reserve the MAC with a specific IP address in the router, netduino will get that IP address assigned with DHCP... the same behavior Lance reported above
BTW, I noticed that after a while (~10 min) it will disappear from the DHCP list of the router.
(My router is a Belkin F5D8235-4 v2000, Firmware v2.01.08.)
Felix
#10191 SPI.WriteRead() returns junk
I've looked through the NETMF source, and AT91 code is doing what CW2 indicated. I could send you a saleae analyzer SPI capture where you can see how MISO/MOSI/CS are being asserted, at very different times ... basically the signal just looks "dirty". It's probably because of the initialization that takes place at each SPI transfer. That SPI code leaves a lot to desire. Well, from what I understand the published code in the downloads section is still a few alphas/betas behind, so it doesn't include some of the code fixes. I'd assume hackers would still like to have the latest source, but I can understand the time lag until you guys make it to CodePlex. Probably more important, would be a Wiki where people could post tutorials and recipes for doing different things. I struggled all afternoon and last night to build 4.1.0.5 using GCC 4.4 and 4.2, with no success, I keep getting errors. There are scattered posts with bits and pieces on how this task could be achieved but ... it seems that what works for someone does not work for someone else. That unfortunate... I've been trying to build this source so I could start figuring out how to write a native SPI driver of some kind to fit my needs. Either way please consider a Wiki in the near future. It's very time consuming to find good information in the forum, and it's often very scattered. The bigger this forum gets, the harder that will become. Again, no hard feelings. I can wait a few more days for the next code release. I'll keep on trying to build the existing source in the meantime, that's my priority right now. #10085 Compiling netmf with GCC4.2
I can really appreciate your information.
However, being a newbie with regards to netduino in general, I really don't know where to start. I have a need to build some custom SPI drivers, but I'm at a loss on how I should go about it.
I've seen different people building the netduino firmware with different compilers (RVDS and various versions of GCC) with different results.
Given my need, I'm not sure if i really need to rebuild the netduino firmware myself?
From your post it looks like there are different options with regards to loading the bootloader/tinyCLR. It would be nice if someone would explain (in a wiki, but there's no wiki) what the different options/components of deployment are. With the standard netduino firmware (Chris Walker's pinned posts), there is a big lag after you power up the netduino, until the actual code starts running (a few seconds .. thats a lot). So I would be interested in making that go away, while still enabling updating the firmware. Also, it would be nice if someone explained these XML files in more detail, for instance - whats a 'block'?
#10084 Netduino Firmware v4.1.2 ALPHA 0
What are some of the benefits of this new "USBClient" feature? Sorry but I'm not familiar with what it means.
I'd be interested in allowing direct access to the SD card content through netduino's USB, would that be doable with this USBClient thing?
#10083 SPI.WriteRead() returns junk
You're right, and it appears that it disables the internal pullups... #10081 SPI.WriteRead() returns junk
I tried the 220 resistor between the netduino CS and device CS with no success. The data is the same. FWIW, the NETMF SPI init also turns on the internal pullup resistors on CLK/MISO/MOSI ports.
I think the SPI functions are very limited to what they can do, and for more precise SPI timings, the SPI namespace is useless... I would like to start building some drivers but since there is no Wiki ... digging through the many different ways from different people in the forum will be a bad dream. Secret Labs : No disrespect but for doing something more meaningful than blinking LEDs, we need a Wiki, and we need the latest source code! #9841 SPI.WriteRead() returns junk
Hi ajcg1973, Can you detail a bit more on how exactly you connected the resistor to the CS line? My LCD has the following lines, all coming from the netduino+: 3.3v, a few connections to GND, MOSI, MISO, SCLK, CS. Did you connect the 220ohm to 3.3v (pullup)? or to GND (pulldown)? Or to another netduino port (not sure if that would make sense...)? I'm away for the weekend but I'll try the pullup/pulldown on the CS line when I get back. #9740 SPI.WriteRead() returns junk
Hey Chris, I haven't tried that, and it would probably be very slow for any practical purposes. I might try it if I get some time, but in all reality I'm trying to get away from having to implement SPI manually by bitbanging. Meanwhile I ordered a saleae logic analyzer to look at what's going on the wires. At this point I'm looking more at ways to implement my SPI requirements in native code, one way or another. #9729 SPI.WriteRead() returns junk
I tried your suggestion to drive CS explicitly but the command doesn't get picked up by the LCD. The more I look at my requirements, the more I'm convinced that what I need cannot be done with the currently available SPI functionality. I'll have to come up with a native driver of some sort. #9688 SPI.WriteRead() returns junk
CW2, thanks for taking time to read through all this. The interbyte delay should be accounted for by the fact that I'm sending bytes separately. If this did not work at all then I'd be more worried about my code. But like I said, the command is carried out and the screen turns red, which indicates that it received the byte sequence and interpreted it correctly. I just don't know why I'm not getting the expected reply bytes. I do realize that I have to build my own native driver to control a bunch of these from a single master. Instead of using separate CS lines I will need to use a 3-to-8 decoder with 3 wires to control 8 SPI devices. I'm really not sure how to achieve that in native code. I'm new to NETMF and would need some advice on how to actually implement the native code. I'm wondering if Corey's fluent interop can handle something like that. Or should I wait for the rumored interop feature that will be added soon? The SPI code in the NETMF codebase seems to be doing a lot of stuff which I'm not sure I need, but does anyone know if that's a good place to look for code examples of how to write to registers and flip ports? #9681 SPI.WriteRead() returns junk
Sure, see attached. Attached Files
#9661 SPI.WriteRead() returns junk
Chris, I'm sure about the config, per the datasheet the CS is active low, clock idle is high, data sampling is on rising clock edge, clock khz doesn't really matter (I get the same results with 750 - 6000 values). Any other combinations of CS, clock idle and data sampling edge will not work. I know because the LCD will not carry out the [clear screen to specific color] command which I'm sending in my example, unless I have the settings as specified above. So this simple command works with these SPI settings, but I'm not getting back the expected MISO data... #9627 SPI.WriteRead() returns junk
Hello netduino world,
I'm having some trouble with the SPI.WriteRead method. I've seen some older posts that reported issues with this method. I have the latest firmware (4.1.1 alpha7) on my netduino+, but it looks like the data coming back from my device is junk. I have an LCD which talks SPI and always sends back a MISO status register byte as a response to any MOSI byte sent to it. This byte can change during the transmission of a multi byte command, but certain bits in this byte should always be the same (ie ONLINE bit). So I'd expect precise return bytes after each byte sent. Changing the clock does seem to have an effect, the return bytes change the pattern, but with the configuration in the code below I always get a 27 back. If I send the bytes as an array to a single WriteRead() call (commented code), the return bytes are junk, however they seem to have some kind of pattern (I see some bytes repeat in certain positions). I don't have a logic analyzer yet to see what's on the wire but since the simple command in the code below is successful, I don't think my code is bad and I know that the device must be sending the expected MISO values back, but SPI.WriteRead() must be reading them wrong. From what I can tell, the Netduino firmware calls the SPI routines directly from NETMF without any alterations. Thoughts? Could SPI.WriteRead() still broken?
using System;
using System.Net;
using System.Net.Sockets;
using System.Threading;
using Microsoft.SPOT;
using Microsoft.SPOT.Hardware;
using SecretLabs.NETMF.Hardware;
using SecretLabs.NETMF.Hardware.NetduinoPlus;
namespace NetduinoPlusApplication1
{
public class Program
{
public static void Main()
{
var SPIConfig = new SPI.Configuration(Pins.GPIO_PIN_D10, // CS port
false, // SS active when LOW
0, // CS Setup time
0, // CS Hold time
true, // Clock idle is high
true, // Data is sampled on rising edge of clock
6000, // Clock rate in KHz
SPI_Devices.SPI1);
var SPI = new SPI(SPIConfig);
//send some empty bytes first - response should be 0x08 (ONLINE), but always 27 (0x1B)
byte[] readBuff = new byte[] { 0x0 };
SPI.WriteRead(new byte[] { 0x00 }, readBuff);
Debug.Print("" + readBuff[0]);
SPI.WriteRead(new byte[] { 0x00 }, readBuff);
Debug.Print("" + readBuff[0]);
//simple command - clear screen to red, the return bytes are always 27
SPI.WriteRead(new byte[] { 0x13 }, readBuff);
Debug.Print("" + readBuff[0]);
SPI.WriteRead(new byte[] { 0xEC }, readBuff);
Debug.Print("" + readBuff[0]);
SPI.WriteRead(new byte[] { 0x00 }, readBuff);
Debug.Print("" + readBuff[0]);
SPI.WriteRead(new byte[] { 0x01 }, readBuff);
Debug.Print("" + readBuff[0]);
SPI.WriteRead(new byte[] { 0x09 }, readBuff);
Debug.Print("" + readBuff[0]);
SPI.WriteRead(new byte[] { 0x55 }, readBuff);
Debug.Print("" + readBuff[0]);
SPI.WriteRead(new byte[] { 0xAA }, readBuff);
Debug.Print("" + readBuff[0]);
SPI.WriteRead(new byte[] { 0x00 }, readBuff);
Debug.Print("" + readBuff[0]);
//sending the same command this way will instead return junk in the readBuff
//byte[] writeBuff = new byte[] { 0x13, 0xEC, 0x00, 0x01, 0x09, 0x55, 0xAA, 0x00 };
//byte[] readBuff = new byte[9];
//SPI.WriteRead(writeBuff, readBuff);
//now just blink an led
var led = new OutputPort(Pins.ONBOARD_LED, false);
while (true)
{
led.Write(true);
Thread.Sleep(1000);
led.Write(false);
Thread.Sleep(1000);
}
}
}
}
The output is: 27 27 27 27 27 27 27 27 27 27 #9014 another SPI speed rant
While I still eagerly wait for my netplus to arrive... I was speding a lot of time in the forums trying to figure out what the capabilities of the SPI port are, speedwise. And I get mixed impressions, there's a lot of discussion about bit banging, using native code to speed up things and Corey's Fluent Interop which I acually really like (haven't tried it cause .. doh .. I don't have the board yet but to me it looks like a very elegant solution to the problem, maybe because I'm not annoyed by lambdas). But rather than explaining what I think is possible let me explain what I need to do with SPI and then maybe someone can confirm or point me in the right direction. BTW.. I come from coding in Arduino for hardware where certain things are easy, but not having the real IDE power of VStudio makes other things painstakingly slow to debug. Hence my decision to try Netduino.
I will need to use my NetduinoPlus to control 8 LCDs over SPI. They can go up to 10MHz but have some specific timings, for instance a 15us interbyte delay. These LCDs work with arrays of bytes as commands (a few command bytes in the header and then the data). For instance, a clear screen would be a very short command, just a command, no payload. But a display text command would be a few command bytes, a 2 byte length, and then the actual text which could be several bytes. Or even more complicated, I can send display image commands which have the command header, but the payload can get real big real quick depending on the resolution and color depth of the image displayed (several thousand KBs for a full screen). So for displaying an image I would have to be able to read that from say the ethernet, and flush it down the SPI to be displayed on one of the N LCDs, of course... as fast as possible. I saw a post where a guy was having trouble with his SPI DAC not being nearly as fast as he needed it, but in other places I saw ChrisW saying that not even native code can beat the .netmf SPI implementation (which i assume is whatever is available in the firmware?). Let me summarize what I need to do:
#8942 Change Static IP from code
Awesome, just what I needed! Thanks for the quick reply!
#8938 Change Static IP from code
While still waiting for my NPlus to arrive, I was wondering if I will be able to set it up to use static IP addresses, but be able to change it according to what the user wants.
So for example, i would store a config file on the SD card, which would hold IP address, MAC, gateway, subnet and things like that. Upon start up I would read the config file and set all these settings accordingly.
I was looking through topics and its not really apparent what the options are as far as connecting/disconnecting, DHCP/static. Could someone with more knowledge shed some light here... Thanks
#8892 Regulator Max Current
Yeah, just wondering myself, what is the power consumption of the netduino+ when using everything on the board (ethernet + sd)?
I ordered a netduino+ and i need to run about 8 LCDs (they require 3.3v) and are rated at about 30ma each (im not sure but according to ohms law i think 30ma at 3.3v is less than 30ma at 5v ... can someone confirm). So how could I accurately estimate how the overall power consumption on the 3.3v line (from the netduino 3.3v regulator) is impacting the total 500ma USB figure?
What would happen if somehow my LCDs power + NetduinoPlus power exceed 500ma that USB can provide? Would it fry my netduino+?
Maybe a stupid question but I'm also wondering if the ethernet draws any significant current when the SD is active, or vice versa (ie, when the uC talks to the SD, does the ethernet card draw any current in that mean time).
| ||||||||||||||
|
||||||||||||||
| This webpage is licensed under a Creative Commons Attribution-ShareAlike License. | ||||||||||||||