klotz's Content
There have been 60 items by klotz (Search limited from 13-July 24)
#10829 Keypad driver and scheme
 Posted by
on 11 March 2011 - 10:46 PM
in
Netduino 2 (and Netduino 1)
Posted by
on 11 March 2011 - 10:46 PM
in
Netduino 2 (and Netduino 1)
#10803 Keypad driver and scheme
Posted by
on 10 March 2011 - 10:22 PM
in
Netduino 2 (and Netduino 1)
using System;
using System.Collections;
using System.Threading;
using Microsoft.SPOT.Hardware;
namespace Sparkfun_12_key_keypad
{
public class Keypad
{
private InterruptPort Col1;
private InterruptPort Col2;
private InterruptPort Col3;
private OutputPort Row1;
private OutputPort Row2;
private OutputPort Row3;
private OutputPort Row4;
private uint column1 = 0;
private uint column2 = 0;
private uint column3 = 0;
private uint recieveKey;
void Col_OnInterrupt(uint whichCol, uint data2, DateTime time)
{
recieveKey = 0xFFFFFF;
for (uint Row = 0; Row < 4; Row++)
{
switch (Row)
{
case 0:
Row1.Write(false);
Row2.Write(true);
Row3.Write(true);
Row4.Write(true);
break;
case 1:
Row1.Write(true);
Row2.Write(false);
Row3.Write(true);
Row4.Write(true);
break;
case 2:
Row1.Write(true);
Row2.Write(true);
Row3.Write(false);
Row4.Write(true);
break;
case 3:
Row1.Write(true);
Row2.Write(true);
Row3.Write(true);
Row4.Write(false);
break;
}
if ((whichCol == column1) && (Col1.Read() == false))
{
recieveKey = (Row*3);
break;
}
else if ((whichCol == column2) && (Col2.Read() == false))
{
recieveKey = (1 + (Row*3));
break;
}
else if ((whichCol == column3) && (Col3.Read() == false))
{
recieveKey = (2 + (Row * 3));
break;
};
}
Row1.Write(false);
Row2.Write(false);
Row3.Write(false);
Row4.Write(false);
}
public Keypad( Cpu.Pin Col1, Cpu.Pin Col2, Cpu.Pin Col3, Cpu.Pin Row1, Cpu.Pin Row2, Cpu.Pin Row3, Cpu.Pin Row4)
{
this.Col1 = new InterruptPort(Col1, true, Port.ResistorMode.PullUp, Port.InterruptMode.InterruptEdgeLow);
this.Col2 = new InterruptPort(Col2, true, Port.ResistorMode.PullUp, Port.InterruptMode.InterruptEdgeLow);
this.Col3 = new InterruptPort(Col3, true, Port.ResistorMode.PullUp, Port.InterruptMode.InterruptEdgeLow);
this.column1 = (uint)Col1;
this.column2 = (uint)Col2;
this.column3 = (uint)Col3;
this.Row1 = new OutputPort(Row1, false);
this.Row2 = new OutputPort(Row2, false);
this.Row3 = new OutputPort(Row3, false);
this.Row4 = new OutputPort(Row4, false);
this.Col1.OnInterrupt += new NativeEventHandler(Col_OnInterrupt);
this.Col2.OnInterrupt += new NativeEventHandler(Col_OnInterrupt);
this.Col3.OnInterrupt += new NativeEventHandler(Col_OnInterrupt);
}
}
}
You just have to make sure that the pins you use for Columns are interrupt pins.
#10802 Keypad driver and scheme
Posted by
on 10 March 2011 - 10:18 PM
in
Netduino 2 (and Netduino 1)
Attached Thumbnails

#10157 Controlling multiple LEDs with a few outputs as possible
Posted by
on 25 February 2011 - 04:24 AM
in
Netduino 2 (and Netduino 1)
#10103 Controlling multiple LEDs with a few outputs as possible
Posted by
on 24 February 2011 - 09:34 PM
in
Netduino 2 (and Netduino 1)
First, the address should be in the range of 0x20 - 0x27. With the way it is wired, assuming the drawing is correct, the address of the configuration should be 0x20.
It appears that you have this right, but let me explain for those who may not be aware. The I2C address as used by the I2CDevice.Configuration is the 7-bit address. With some other interfaces for I2C, it is common to list two addresses for a device, one write address and one read address. The two addresses differ only in the lsb, where an even number is the write address and an odd number is the read. In the case of those interfaces, the address would be 0x40 for Write and 0x41 for Read.
This gets more confusing since some datasheets list the addresses as the Read/Write address, for instance Newhaven displays and the Sparkfun MPR121 use this method. In those cases to use the device you will often see
new I2CDevice.Configuration(ADDR >> 1, 100);
Second, according to the data sheet, when using the I2C device the speeds are 100kHz, 400kHz and 1.7 MHz so that is correct.
Now for the final point. I will admit that at this time I am just a compitent C# programmer. But I generally avoid using "var" when I know the data type. So, I would avoid using:
var setIOCON = I2CDevice.CreateWriteTransaction(new byte[] { IOCON, 0x24 });
instead I would have used:
I2CDevice.I2CTransaction setIOCON = I2CDevice.CreateWriteTransaction(new byte[] { IOCON, 0x24 });
Other than that I will see what I can do about duplicating you hardware and see if I can find something else.
#9904 i2C netduino won't work!
Posted by
on 20 February 2011 - 06:57 PM
in
Netduino 2 (and Netduino 1)
Attached Thumbnails
#9891 i2C netduino won't work!
Posted by
on 20 February 2011 - 01:01 PM
in
Netduino 2 (and Netduino 1)
If you start from "New project" paste the embedded code to you programs.cs, you would only have to add a reference to the Newhaven Displays class.
using System;
using System.Threading;
using Microsoft.SPOT;
using Microsoft.SPOT.Hardware;
using SecretLabs.NETMF.Hardware;
using SecretLabs.NETMF.Hardware.Netduino;
namespace Netduino_With_Newhaven_Display
{
public class Program
{
private static NewhavenDisplay.SerialLCD display;
private static I2CDevice bus;
static void sendFunction(byte[] data)
{
I2CDevice.I2CTransaction[] xAct = new I2CDevice.I2CTransaction[] { I2CDevice.CreateWriteTransaction(data) };
int bytes = bus.Execute(xAct, 1000);
}
public static void Main()
{
bus = new I2CDevice(new I2CDevice.Configuration(0x50 >> 1, 100));
display = new NewhavenDisplay.SerialLCD(sendFunction);
display.Clear();
display.Write("Well did it work?");
display.Write("Lets see what happens with this one");
}
}
}
#9873 i2C netduino won't work!
Posted by
on 20 February 2011 - 04:13 AM
in
Netduino 2 (and Netduino 1)
#6913 Question about SPI
Posted by
on 03 January 2011 - 03:28 PM
in
General Discussion
If available and if the distance is not too great I would prefer I2C over SPI.
Could you break this down a bit more? Distance being what? If I have a central Netduino in the house, and several scattered around the property, what's the prefered for 50 -200 ft, CAT5 cable?
I would not use I2C or SPI for those distances. In the first case, one should not think of I2C or SPI as a protocol for anything say outside the box. Both are intended for communication between ICs or small peripherals, like ethernet chips, lCD displays and the like.
If I have to go more than a couple of feet, then I would start to concider one of the interconnect serial protocols like Async (TTL, RS232, or RS485.)
Then if we are in the range of Room to Room or greater I would concider ethernet.
So in answer to you direct question. At 50-200ft, especially if you have already installed CAT5, go ethernet. The shields for 'duinos are cheap and .NETMF makes it easy to program.
#6866 Question about SPI
Posted by
on 03 January 2011 - 12:25 AM
in
General Discussion
Tx and Rx are used for Asynchronous Serial communication which is sometimes described as "self clocking". This is misleading to most users in that the data rate must generally be agreed upon before hand as Chris has stated, the selfclocking come from the method for detecting the begining of the data octet or byte. Here is the Wikkipedia page that describes this http://en.wikipedia....ver/transmitter as before I can only vouch for the correctness as of Jan 2, 2010 when I read it.What are the differences between SPI and the other thing that uses TX and RX? I understand that SPI has a clock so the shift register (lets use that as an example) knows when to read the other pin for a HIGH or LOW. but then how does the TX and RX communicate? how does it know when to get the data? Are they both Serial types of communication or not? Any info is appreciated, links are good too. Thanks!

If I had a choice, I would use SPI over TX/RX because it is easier for me to use. If available and if the distance is not too great I would prefer I2C over SPI.
#6865 Question about SPI
Posted by
on 03 January 2011 - 12:19 AM
in
General Discussion
What are the differences between SPI and the other thing that uses TX and RX? I understand that SPI has a clock so the shift register (lets use that as an example) knows when to read the other pin for a HIGH or LOW. but then how does the TX and RX communicate? how does it know when to get the data? Are they both Serial types of communication or not? Any info is appreciated, links are good too. Thanks!
I don't know how much time you have to read stuff, and we could spend a lot of time asking and answering questions so I thought that it may be helpful to supply you with a link to the Wikki page that describes SPI. This may be way more than you wanted to know but there are nuances to using SPI that are not immediately apparent and which many of us take for granted. So here is the Wikki link ( and yes I read it and it is a good description on Jan 2, 2010
You know how Wikkipedia can be )http://en.wikipedia....l_Interface_Bus
#6022 InterruptPort please stop interrupting me! Help.....
Posted by
on 13 December 2010 - 12:29 AM
in
General Discussion
#4396 Where to find these connectors?
Posted by
on 31 October 2010 - 05:04 PM
in
General Discussion
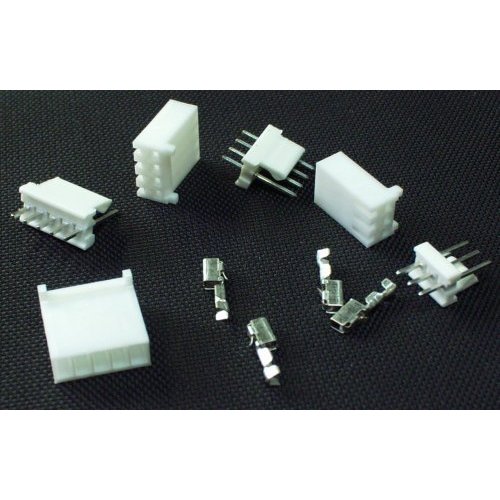
I think this is what you are looking for if the ones in your second picture will work. http://www.sparkfun....roducts_id=8232Hey,
I'm looking for male PCB mount connectors and their female counterparts (leads). I prefer the connectors have only one way to connect, so you can't switch poles by accident.
I've seen leads like these on LiPo batteries, but I can't seem to find anything useful on RS Online or Mouser when searching for "JST connector".
The PCB connector part looks something like the white connectors on this shield.
I'm EU based so I prefer a supplier like Mouser or RS Online that ships easily to Belgium. Any other EU based shop is good too!
Thanks a lot!
Niels R.
Attached Thumbnails
#4151 Where can I get an at91sam7x512
Posted by
on 23 October 2010 - 08:32 PM
in
Netduino 2 (and Netduino 1)
 I believe that I have been able to verify that the board is still viable so I wanted to "glue" a new cpu chip on this guy to test my smd skills.
Any one know where I can locate a at91sam7x512?
I believe that I have been able to verify that the board is still viable so I wanted to "glue" a new cpu chip on this guy to test my smd skills.
Any one know where I can locate a at91sam7x512?
#3740 Experimental Drivers for Wiznet-based Ethernet Shields
Posted by
on 10 October 2010 - 11:36 AM
in
Beta Firmware and Drivers
Probably not the way to do it, but I got it to accept multiple connects by moving these 2 lines of code inside the while(true) loop in the Main()
Socket listenSocket = new Socket(AddressFamily.InterNetwork, SocketType.Stream, ProtocolType.Tcp); listenSocket.Bind(ep);
So the listening socket gets created and bound every time it finished a connection
No I can connect as many times to the Netduino as I want.

I would never have thought to do it that way. I am used to using sockets under WinSocks and you would not normally have to recreate the socket to get a new connection. It looks to me like it is not dropping the connection when I close the socket. Your solution causes the socket to be desposed and that may explain why it works.
#3721 Experimental Drivers for Wiznet-based Ethernet Shields
Posted by
on 09 October 2010 - 05:08 PM
in
Beta Firmware and Drivers
#3668 Experimental Drivers for Wiznet-based Ethernet Shields
Posted by
on 08 October 2010 - 07:53 PM
in
Beta Firmware and Drivers
Ramon,
While I'm unfamiliar with this particular code, I've seen that behavior before and in my case it was because my Ethernet Shield (NKC and authentic Arduino Ethernet Shield) require the 6 pin ICSP header. Both shields were stuck waiting until I solder the ICSP header on the Netduino. You might be running into the same issue.
That is a very good point. I did have a problem with my Seeeduino Ethernet board, it would not accept any of the commands. It turned out that I could do one of two things, add an ICSP connector to my Netduino or change some soldered jumpers on the board.
You may want to check to see if the enthernet board has jumpers. The best place to look would be on the schematic.
#3659 Experimental Drivers for Wiznet-based Ethernet Shields
Posted by
on 08 October 2010 - 10:47 AM
in
Beta Firmware and Drivers
Hi klotz!
I'm trying to get your test project to run, but I must be doing something wrong, because it never gets past this "do loop":
do
{
socketStatus = ReadRegister((UInt16)(socketBaseAddress + 0x0003));
} while (socketStatus != (byte)WiznetStatus.SOCK_ESTABLISHED);
It never returns:
WiznetStatus.SOCK_ESTABLISHED
Do you have any idea what can be wrong?
Thanks,
Ramon
I can't be sure without more details, so I appologize for asking the obvious question, 1) do you have the board connected to a 192.168.11.x network? 2) Have you posted a request from a client computer, "http://192.168.11.98"?
The code waits for a connections from the client, the loop you mentioned so is blocked.
#3649 Experimental Drivers for Wiznet-based Ethernet Shields
Posted by
on 08 October 2010 - 01:19 AM
in
Beta Firmware and Drivers
Attached Files
-
 MyFirstWebPage.zip 80.87KB
95 downloads
MyFirstWebPage.zip 80.87KB
95 downloads
-
Wiznet5100v2.zip 17.35KB
101 downloads
#3629 Just cooked my 'duino
Posted by
on 07 October 2010 - 04:39 PM
in
Netduino 2 (and Netduino 1)
Unfortunately, the Atmel chip is about a $20 chip (of course unless it is purchased in quantity). I'd say digikey is your best bet.
Just be lucky it isn't a ~$150 chip

In either case logic dictates that I order a new Netduino. $20 + shipping and handling and frustration of removing the old and adding a new > 34.95 + shipping and handling.
#3616 Just cooked my 'duino
Posted by
on 07 October 2010 - 10:11 AM
in
Netduino 2 (and Netduino 1)
Now there's a good suggestion.Since I am normally a software guy, where would be the best place to get a replacement Atmel? Digikey is asking $20+shipping handling tax. Almost the price of a new Netduino.R.I.P.
But now you have a perfect board to practice SMD reworking (assuming you've burnt just the micro)

Any suggestion where else I should look?
#3596 Just cooked my 'duino
Posted by
on 07 October 2010 - 02:15 AM
in
Netduino 2 (and Netduino 1)
Hi klotz,
No fun at all. It sounds like it got fried, but you may want to try erasing the Netduino (using the ERASE) pad and seeing if you can reprogram it. It's probably fried--but there's a small possibility of recovery...
Chris
P.S. Reverse power protection and a resettable fuse are built into the Netduino. And the odd pin spacing for shields helps keep pins in the right place. But while Netduino is designed to take a certain amount of abuse, it is possible to fry a pin (or in more extreme cases, to fry a whole Netduino). Most users will be fine--but it makes me sad to see one get electrocuted...
He's dead Chris.
No amount of protection can survive an unattentive user. Just got to excited about testing my two ethernet shields and didn't notice I had plugged it in wrong. The Seeeduino shield is wider than most so it is not as easy to see the pins if you don't pick it up and inspect it.
And of course I was convince I had checked it so I let it cook while I trouble shot the failure to connect. The Atmel was way hot, and I can't get any response from it at all except a very bad smell and lots of heat.
(Kind of reminds me of like Washington D.C. or Springfield, IL)
I'll mount this one on the wall with a note "CHECK THE SHIELD" hanging from it.
That's what overconfindence will get you.
#3594 Just cooked my 'duino
Posted by
on 07 October 2010 - 12:39 AM
in
Netduino 2 (and Netduino 1)
I ALWAYS triple check my connections. So far, I have not fried even a single component.
I have gotten quite close thoughJust ask my temp sensor that had a backwards pinout to the dumb datasheet....
I guess I shouldn't try to work on my board with distractions. Just did not notice the pins that were not in their sockets.
#3591 Just cooked my 'duino
Posted by
on 07 October 2010 - 12:11 AM
in
Netduino 2 (and Netduino 1)
 Well live and learn. From now on, I won't power-up without checking the connections.
Oh well now I have to order a new one
Just had to get that off my chest.
Well live and learn. From now on, I won't power-up without checking the connections.
Oh well now I have to order a new one
Just had to get that off my chest.
#3506 Compatible Shields and Accessories
Posted by
on 04 October 2010 - 11:36 PM
in
Netduino 2 (and Netduino 1)





{kind=link}
{kind=link}