Posted by
Posted by
Have fun!
using System;
using System.Threading;
using System.Collections;
using Microsoft.SPOT;
using Microsoft.SPOT.Hardware;
using SecretLabs.NETMF.Hardware;
using SecretLabs.NETMF.Hardware.Netduino;
namespace iambic_keyer
{
public class Program
{
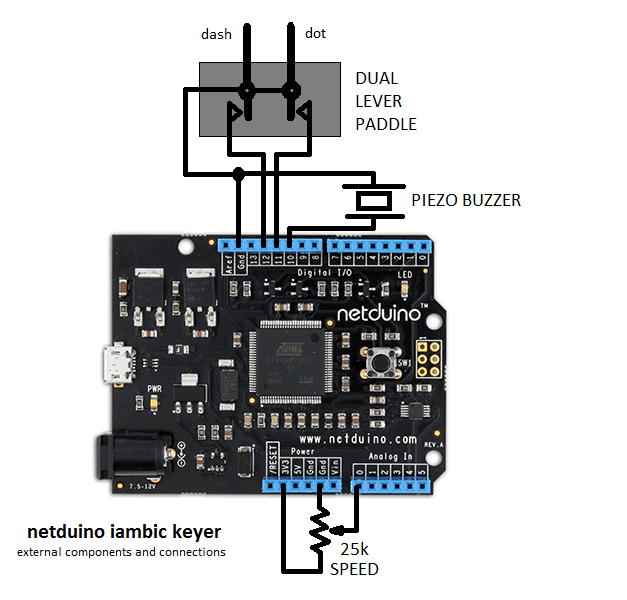
static OutputPort pin_led = new OutputPort(Pins.ONBOARD_LED, false);
static PWM pin_buzzer = new PWM(Pins.GPIO_PIN_D10);
static InputPort pin_left = new InputPort(Pins.GPIO_PIN_D11, false, Port.ResistorMode.PullUp);
static InputPort pin_right = new InputPort(Pins.GPIO_PIN_D12, false, Port.ResistorMode.PullUp);
static AnalogInput pin_speed = new AnalogInput(Pins.GPIO_PIN_A0);
static bool both_paddles_old;
static bool both_paddles_released;
enum TIMER_STATE
{
IDLE1, IDLE2, IDLE3, ON1, ON2, OFF
};
static TIMER_STATE timer_state;
static long dit_time;
static long duration;
enum KEYER_MODE
{
IAMBIC_A, IAMBIC_B
};
static KEYER_MODE keyer_mode;
static long element_stop_time;
static long char_stop_time;
static long word_stop_time;
static uint buzzer_period;
static int mchar;
static int mchar_elements;
static Hashtable mcode_tab = new Hashtable();
public static void Main()
{
setup();
while (true)
{
loop();
}
}
static void setup()
{
mcode_tab[0x0201] = "A"; // 01
mcode_tab[0x0408] = "B"; // 1000
mcode_tab[0x040A] = "C"; // 1010
mcode_tab[0x0304] = "D"; // 100
mcode_tab[0x0100] = "E"; // 0
mcode_tab[0x0402] = "F"; // 0010
mcode_tab[0x0306] = "G"; // 110
mcode_tab[0x0400] = "H"; // 0000
mcode_tab[0x0200] = "I"; // 00
mcode_tab[0x0407] = "J"; // 0111
mcode_tab[0x0305] = "K"; // 101
mcode_tab[0x0404] = "L"; // 0100
mcode_tab[0x0203] = "M"; // 11
mcode_tab[0x0202] = "N"; // 10
mcode_tab[0x0307] = "O"; // 111
mcode_tab[0x0406] = "P"; // 0110
mcode_tab[0x040D] = "Q"; // 1101
mcode_tab[0x0302] = "R"; // 010
mcode_tab[0x0300] = "S"; // 000
mcode_tab[0x0101] = "T"; // 1
mcode_tab[0x0301] = "U"; // 001
mcode_tab[0x0401] = "V"; // 0001
mcode_tab[0x0303] = "W"; // 011
mcode_tab[0x0409] = "X"; // 1001
mcode_tab[0x040B] = "Y"; // 1011
mcode_tab[0x040C] = "Z"; // 1100
mcode_tab[0x050F] = "1"; // 01111
mcode_tab[0x0507] = "2"; // 00111
mcode_tab[0x0503] = "3"; // 00011
mcode_tab[0x0501] = "4"; // 00001
mcode_tab[0x0500] = "5"; // 00000
mcode_tab[0x0510] = "6"; // 10000
mcode_tab[0x0518] = "7"; // 11000
mcode_tab[0x051C] = "8"; // 11100
mcode_tab[0x051E] = "9"; // 11110
mcode_tab[0x051F] = "0"; // 11111
mcode_tab[0x0511] = "="; // 10001
mcode_tab[0x0615] = "."; // 010101
mcode_tab[0x0605] = "SK"; // 000101
mcode_tab[0x0516] = "KN"; // 10110
mcode_tab[0x0512] = "/"; // 10010
mcode_tab[0x060C] = "?"; // 001100
both_paddles_old = false;
both_paddles_released = false;
timer_state = TIMER_STATE.IDLE3;
duration = 1; // 1 = dit, 3 = dah
mchar = 0;
mchar_elements = 0;
pin_speed.SetRange(5, 50); // wpm: 5 .. 50
buzzer_period = 1000000 / 800; // buzzer frequency: 800 Hz
// keyer_mode = KEYER_MODE.IAMBIC_A;
keyer_mode = KEYER_MODE.IAMBIC_B;
}
static void loop()
{
int wpm = pin_speed.Read();
bool right_paddle = !pin_right.Read();
bool left_paddle = !pin_left.Read();
long milliseconds = Utility.GetMachineTime().Ticks / System.TimeSpan.TicksPerMillisecond;
dit_time = 1022 / wpm; // dit duration in milliseconds
bool both_paddles = left_paddle && right_paddle;
both_paddles_released = both_paddles_released || (both_paddles_old && !both_paddles);
both_paddles_old = both_paddles;
switch (timer_state)
{
case TIMER_STATE.IDLE1:
if (milliseconds >= char_stop_time)
{
int mcode;
mcode = mchar_elements << 8 | mchar;
object x = mcode_tab[mcode];
if (x != null)
{
Debug.Print(x.ToString());
}
mchar_elements = 0;
mchar = 0;
timer_state = TIMER_STATE.IDLE2;
}
goto ts_idle3;
case TIMER_STATE.IDLE2:
if (milliseconds >= word_stop_time)
{
Debug.Print(" ");
timer_state = TIMER_STATE.IDLE3;
}
goto ts_idle3;
case TIMER_STATE.IDLE3:
ts_idle3:
if (keyer_mode == KEYER_MODE.IAMBIC_B && both_paddles_released)
{
both_paddles_released = false;
duration = duration == 1 ? 3 : 1;
timer_state = TIMER_STATE.ON1;
}
else if (left_paddle && !right_paddle)
{
duration = 1; // dit
timer_state = TIMER_STATE.ON1;
}
else if (!left_paddle && right_paddle)
{
duration = 3; // dah
timer_state = TIMER_STATE.ON1;
}
else if (left_paddle && right_paddle)
{
duration = duration == 1 ? 3 : 1;
timer_state = TIMER_STATE.ON1;
}
break;
case TIMER_STATE.ON1:
element_stop_time = milliseconds + dit_time * duration; // dit or dah
pin_buzzer.SetPulse(buzzer_period, buzzer_period / 2); // Buzzer on
pin_led.Write(true); // LED on
timer_state = TIMER_STATE.ON2;
break;
case TIMER_STATE.ON2:
if (milliseconds >= element_stop_time)
{
element_stop_time = milliseconds + dit_time; // space after dit or dah
pin_buzzer.SetPulse(0, 0); // Buzzer off
pin_led.Write(false); // LED off
timer_state = TIMER_STATE.OFF;
}
break;
case TIMER_STATE.OFF:
if (milliseconds >= element_stop_time)
{
if (mchar_elements < 8)
{
switch (duration)
{
case 1:
mchar = mchar << 1; // dit = 0
mchar_elements++;
break;
case 3:
mchar = (mchar << 1) + 1; // dah = 1
mchar_elements++;
break;
}
}
char_stop_time = milliseconds + dit_time * 3; // gap between letters
word_stop_time = milliseconds + dit_time * 7; // gap between words
timer_state = TIMER_STATE.IDLE1;
}
break;
}
}
}
}