Posted by
Posted by
It should, with the Hd44780Lcd class.
Since the Netduino Plus 2 is so blazingly fast, if you attempt to use this class as-is it will won't work.
What you will need to do is hold the clock enable pin high just a little longer rather than just toggling it as was done in the original driver.
This happens around line 366 in the _Write4Bits method of Hd44780Lcd.cs.
private void _Write4Bits(byte Byte){ ....... // Enables the pin for a moment this._CePin.Write(true); for (var idx = 0; idx < 1000; ++idx) ; this._CePin.Write(false);?
?
?
?
?
?
I haven't experimented too much with the exact number of iterations necessary but 1000 seemed to do the trick.
To deploy this you can either update the source code in the tool box and recompile, or just include the file Hd4470Lcd.cs into your project and make the change there. Either way you'll need to include references for "Toolbox.NETMF.Core" and "Toolbox.NETMF.Hardware.Core" to your project.
-twb
 .
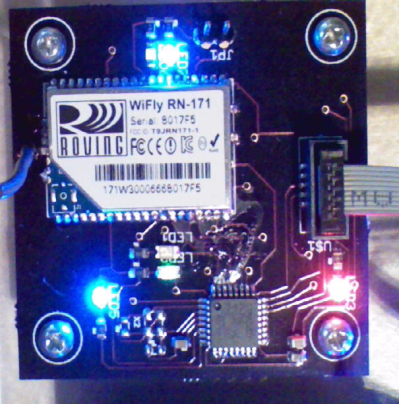
I've got a little more info on this module on my blog
.
I've got a little more info on this module on my blog  -twb
-twb

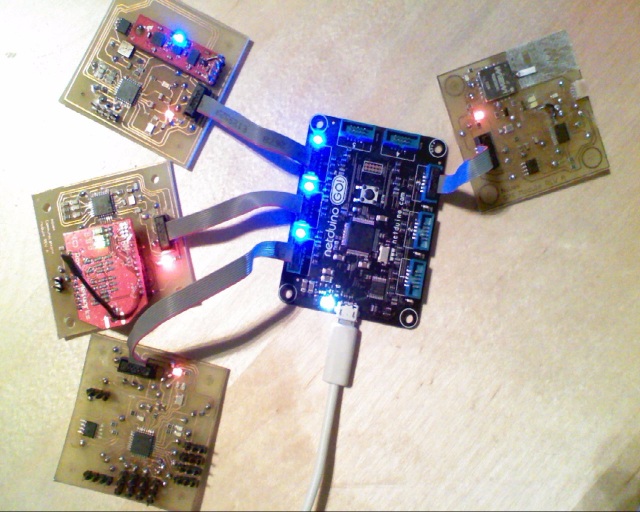
 STM8S where an interrupt handler processes the slave's incoming SPI, not one of those "new-fangled" STM32F0 chips with DMA and megabit SPI. Anyway, I might have some possibilities to tune the interrupt handler but it seems like if I run SPI faster than 166KHz, I'm getting corrupted messages.
One of my modules sends about 120 characters to be relayed via WiFi, this is taking 3.5ms. Since I'm assuming that the processor really isn't needed full time to send out these characters, I'm wondering if there is any sort of async way to queue up and send a byte buffer to a module. In this case, it could be fire-and-forget, however it also might be nice to get a call back for some other things I'm doing with the response buffer. This would also get interesting since from what I understand there are to SPI channels, each serving 4 GO! bus modules.
I love the module approach with the GO! platform, but for communicating in a real-time basis with the modules is starting to seem like it's becoming neck.
Thoughts?
-twb
STM8S where an interrupt handler processes the slave's incoming SPI, not one of those "new-fangled" STM32F0 chips with DMA and megabit SPI. Anyway, I might have some possibilities to tune the interrupt handler but it seems like if I run SPI faster than 166KHz, I'm getting corrupted messages.
One of my modules sends about 120 characters to be relayed via WiFi, this is taking 3.5ms. Since I'm assuming that the processor really isn't needed full time to send out these characters, I'm wondering if there is any sort of async way to queue up and send a byte buffer to a module. In this case, it could be fire-and-forget, however it also might be nice to get a call back for some other things I'm doing with the response buffer. This would also get interesting since from what I understand there are to SPI channels, each serving 4 GO! bus modules.
I love the module approach with the GO! platform, but for communicating in a real-time basis with the modules is starting to seem like it's becoming neck.
Thoughts?
-twb
 .
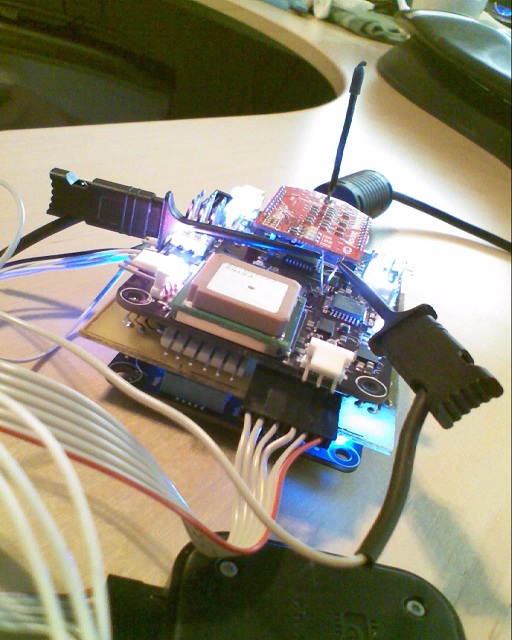
As noted in the video, I'm seeing a lot of noise in the accelerometer when I power up the motors, but the gyro is clean. Using a complementary filter I'm getting decent attitude readings (pitch/roll), but it's still bouncing around a couple of degrees, if anyone has any suggestions on how to isolate and cleanup the problem, I'd love to hear them
.
As noted in the video, I'm seeing a lot of noise in the accelerometer when I power up the motors, but the gyro is clean. Using a complementary filter I'm getting decent attitude readings (pitch/roll), but it's still bouncing around a couple of degrees, if anyone has any suggestions on how to isolate and cleanup the problem, I'd love to hear them  )
)






 .
.