This would be a guess but there was probably another sensor conected to that 3 pin connector. Maybe a home position sensor or something.
The decoupling cap serves to smooth out the power supply. It acts like a shock absorber on the supply voltage. Without it small spikes on the power supply would be created whenever loads were switched on and off and these spikes might be transfered to the output signal.
The spikes on the output could be mistaken for real output transitions and cause the encoder to lose its count.
I posted some code on the Wiki last night for a rotary encoder. Chances are that it would work fine with your strip as well.
http://wiki.netduino...oder-Input.ashx
Mike P's Content
There have been 41 items by Mike P (Search limited from 05-July 24)
#17702 What is this called?
 Posted by
on 07 September 2011 - 01:42 AM
in
General Discussion
Posted by
on 07 September 2011 - 01:42 AM
in
General Discussion
#17567 What is this called?
Posted by
on 05 September 2011 - 09:17 AM
in
General Discussion
#17521 Wiki tutorial on SPI
Posted by
on 04 September 2011 - 12:31 PM
in
General Discussion
My English could be better and it is my firt language.
What I meant to say was
CPOL and NCPHA select 1 of four SPI modes and Clock_Edge and Clock_Idle also select one of 4 SPI modes.
#17499 Wiki tutorial on SPI
Posted by
on 04 September 2011 - 01:37 AM
in
General Discussion
Hi Mario,
Thanks for adding the example.
I think that a tutorial on using the 74HC595 is worthy of being a wiki topic in its own right.
Can I suggest that you copy the tutorial to a new topic and link to that from the SPI configuration topic.
This bit is not quite correct:
"In the below picture there are the four possible combinations of Clock_Edge (NCPHA) and Clock_Idle (CPOL)"
The NCPHA and CPOL bits used by the processor to control the SPI transfer do not map directly to the Clock_Edge and Clock_Idle parameters.
It is not true to say that Clock_Edge==NCPHA. If CPOL==1 then Clock_Edge = !NCPHA
It is correct that CPOL and NCPHA select 1 of four SPI modes and Clock_Edge and Clock_Idle have the same function.
It would be better to show an excerpt from the 74HC595 datasheet and highlight what to look for.
#17286 Unable to deploy without disconnect\reconnect USB cable
Posted by
on 30 August 2011 - 09:47 PM
in
Netduino Plus 2 (and Netduino Plus 1)
I thouth I would give this thread another kick to see if anyone else has any ideas.
Is this behaviour normal then?
Does everyone just unplug their netduino every time they deploy?
I've tried all the available firmwares in the hope this might be a bug that has been addressed.
4.106 through to 4.2RC1
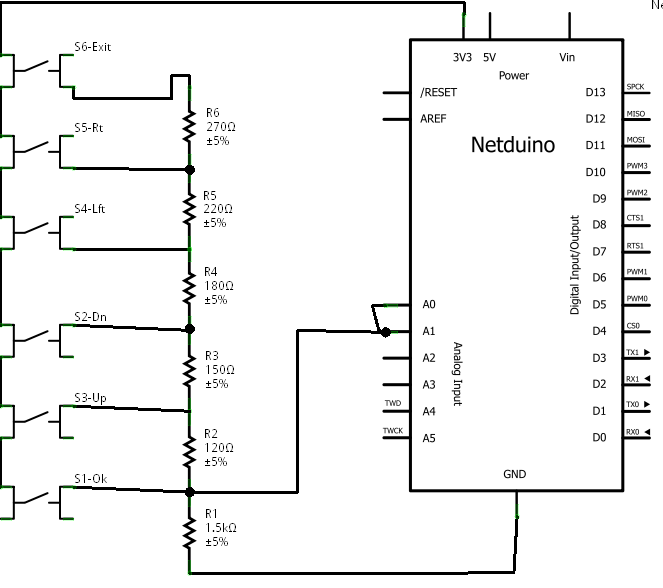
#17279 Six Button Interface for LCD Menu System.
Posted by
on 30 August 2011 - 04:12 PM
in
General Discussion
Now I've got to put my money where my mouth is!
This should work but untested

 I tried to put a table in below but the TABs get stripped out so it's in CSV form instead.
The table below gives the resistor values,
The total resistance when the button is pressed,
The voltage on the analog input,
The ADC reading,
The difference between the ADC value for this button and the next one up,
and the suggested cut-off value to use when deciding which button has been pressed
I even managed to keep to common value resistors and get very even separation between the voltages.
Vcc=3300mV
Button,Resistor,Total R,mV,ADC,delta,cutoff
Cancel,1500,1500,3300,1024,,986
Right,120,1620,3056,948,76,908
Left,150,1770,2797,867,81,827
Down,180,1950,2538,787,80,747
Up,220,2170,2281,707,80,668
Select,270,2440,2029,629,78,315
None,,,0,0,629,
In the schematic the second analog input pin would actually be used as a digital interrupt pin and could be on any of the GPIO pins. Its not necessary if you don't mind polling the analog input continuously.
I tried to put a table in below but the TABs get stripped out so it's in CSV form instead.
The table below gives the resistor values,
The total resistance when the button is pressed,
The voltage on the analog input,
The ADC reading,
The difference between the ADC value for this button and the next one up,
and the suggested cut-off value to use when deciding which button has been pressed
I even managed to keep to common value resistors and get very even separation between the voltages.
Vcc=3300mV
Button,Resistor,Total R,mV,ADC,delta,cutoff
Cancel,1500,1500,3300,1024,,986
Right,120,1620,3056,948,76,908
Left,150,1770,2797,867,81,827
Down,180,1950,2538,787,80,747
Up,220,2170,2281,707,80,668
Select,270,2440,2029,629,78,315
None,,,0,0,629,
In the schematic the second analog input pin would actually be used as a digital interrupt pin and could be on any of the GPIO pins. Its not necessary if you don't mind polling the analog input continuously.

 I tried to put a table in below but the TABs get stripped out so it's in CSV form instead.
The table below gives the resistor values,
The total resistance when the button is pressed,
The voltage on the analog input,
The ADC reading,
The difference between the ADC value for this button and the next one up,
and the suggested cut-off value to use when deciding which button has been pressed
I even managed to keep to common value resistors and get very even separation between the voltages.
Vcc=3300mV
Button,Resistor,Total R,mV,ADC,delta,cutoff
Cancel,1500,1500,3300,1024,,986
Right,120,1620,3056,948,76,908
Left,150,1770,2797,867,81,827
Down,180,1950,2538,787,80,747
Up,220,2170,2281,707,80,668
Select,270,2440,2029,629,78,315
None,,,0,0,629,
In the schematic the second analog input pin would actually be used as a digital interrupt pin and could be on any of the GPIO pins. Its not necessary if you don't mind polling the analog input continuously.
I tried to put a table in below but the TABs get stripped out so it's in CSV form instead.
The table below gives the resistor values,
The total resistance when the button is pressed,
The voltage on the analog input,
The ADC reading,
The difference between the ADC value for this button and the next one up,
and the suggested cut-off value to use when deciding which button has been pressed
I even managed to keep to common value resistors and get very even separation between the voltages.
Vcc=3300mV
Button,Resistor,Total R,mV,ADC,delta,cutoff
Cancel,1500,1500,3300,1024,,986
Right,120,1620,3056,948,76,908
Left,150,1770,2797,867,81,827
Down,180,1950,2538,787,80,747
Up,220,2170,2281,707,80,668
Select,270,2440,2029,629,78,315
None,,,0,0,629,
In the schematic the second analog input pin would actually be used as a digital interrupt pin and could be on any of the GPIO pins. Its not necessary if you don't mind polling the analog input continuously.
#17235 Six Button Interface for LCD Menu System.
Posted by
on 29 August 2011 - 01:37 PM
in
General Discussion
The resistor network works pretty well. I have a DF Robot shield which uses this.
That shield has Up,Dn,Left,Right,Select and Reset(The ultimate cancel?)
One thing that may be a limitation is that it needs to be polled.
You can't trigger an interrupt from an analog input pin. but you could use 2 pins, one as an interrupt port and the other as an analog input and feed the signal into both.
for a digital IO pin voltages over 2.0v are a logic high so arrange the reseistor network so that a voltage of 0v for no keys pressed and voltages of 2.0 - 3.3v for the 6 keys. That's 260mv spacing.
I haven't done the math but that sound like plenty of discrimination.
The digital pin would be used to trigger an interrupt on a rising edge.
Multiple keys being pressed simultaneously can be detected as long as the first key has a lower voltage than the second key.
Usually when you use multiple keys simultaneously you hold one and press the second.
I think that you should be able to implement more than 6 keys with interrupt on keypress and using only 2 pins.
#17234 AD5206 Digi Pot with SPI code....?
Posted by
on 29 August 2011 - 12:36 PM
in
General Discussion
Hi CableGuy,
I have added some info on SPI to the Wiki since you first posted. I hope you will find it useful.
search for SPI on the wiki.
#17085 Help with Proper Servo Driving
Posted by
on 26 August 2011 - 09:09 AM
in
General Discussion
Another solution is to put 3 1N4007 diodes in series. The forward voltage drop is 0.7V each so the output would be 6.9V
#16003 PWM demystified
Posted by
on 28 July 2011 - 12:50 PM
in
Netduino 2 (and Netduino 1)
Since noone has offered ant solution to this, what about using I2C or SPI bus to do it?
You could buffer up a command to send 1024 bits and change the number of 1s to adjust the pulse width.
I don't know what control you have over the bus speed though.
#15999 ADC value divide by 1024 or 1023
Posted by
on 28 July 2011 - 12:26 PM
in
Netduino 2 (and Netduino 1)
Thanks, CW2 for taking the time to explain that.
Mario didn't miss anything either.
So we should be dividing by 1024 and not 1023.
So...
for an ADC value of "n" (assuming Aref=3.30v)
n*3.3/1024 < voltage < (n+1)*3.3/1024
So to calculate a voltage that represented the ADC value with the least quantising error you need to add 1/2 an LSB to the value.
voltage(mV) = (n+0.5)*3300/1024 quantising error = ±0.5*3300/1024
= n * 3.22265625 + 1.6 quantising error = ±1.6mV
I get what Mario was saying about there being other sources of error eg Aref and conversion error.
Do I have this right CW2 and Mario?
#15995 Initializing Brushless Motor problem
Posted by
on 28 July 2011 - 11:55 AM
in
Netduino 2 (and Netduino 1)
I think that the netduino outputs all go high for a period during reset. This is probably being seen as the throttle not at zero by the ESC.
I think most ESCs must be connected with the throttle at zero or they won't work.
This is for obvious safety reasons.
You could need to use some external gate to block the PWM output from the ESC until you are ready to output a proper servo command signal.
Since you have 4 ESC outputs maybe use a quad XOR gate with 1 input of each gate connected together to another output pin that functions as an enable when it is low? This has the advantage of also buffering the servo signals from 3.3 up to 5 volts if you choose.
#15994 ADC value divide by 1024 or 1023
Posted by
on 28 July 2011 - 11:35 AM
in
Netduino 2 (and Netduino 1)
Everything Mario says is correct but I think he missed the question slightly.
The ADC returns a value from 0 to 1023 not 0 to 1024.
0 to 1023 is 1024 different values because zero is a value too.
so ADC value of zero corresponds to 0v and ADC value 1023 corresponds to 3.3v
That is why you divide by 1023 and not 1024.
#15914 Unable to deploy without disconnect\reconnect USB cable
Posted by
on 26 July 2011 - 10:00 AM
in
Netduino Plus 2 (and Netduino Plus 1)
Same thing happens to me.
If I hit the reset button then the I need to replug the usb connection before visual studio will reconnect to it. Running WinXP32. NetduinoPlus 4.1.0.6
#15575 LCDKeypad 16x2 HD44780 Shield
Posted by
on 17 July 2011 - 11:41 AM
in
Project Showcase
Hi All,
I've documented a simple mod to this DFRobot LCD Keypad Shield (DFR0009)
The mod gets the keypad working as intended.
http://forums.netdui...-keypad-shield/
I put the appropriate analog values into the code provided at the beginning of this thread.
The thresholds are chosen to be about mid way between one expected value and the next and are typically 90-100 counts from the expected values so it should be quite reliable.
I've documented a simple mod to this DFRobot LCD Keypad Shield (DFR0009)
The mod gets the keypad working as intended.
http://forums.netdui...-keypad-shield/
I put the appropriate analog values into the code provided at the beginning of this thread.
The thresholds are chosen to be about mid way between one expected value and the next and are typically 90-100 counts from the expected values so it should be quite reliable.
/// <summary>
/// Gets an enumeration of the key press at the current time.
/// Can only be used if the LCD has been initialised with the true parameter.
/// </summary>
/// <returns></returns>
public static Keys GetKey()
{
if (!analogInitialised) throw new Exception("Analog input is not Initialised");
int i = AnKey.Read();
if (i > 910)//expected value = 1024
return Keys.None;
if (i < 90)//expected value = 0
return Keys.Right;
if (i < 290)//expected value = 184
return Keys.Up;
if (i < 490)//expected value = 397
return Keys.Down;
if (i < 690)//expected value = 578
return Keys.Left;
//expected value = 796
return Keys.Select;
}
#15572 DFRobot LCD Keypad Shield
Posted by
on 17 July 2011 - 10:52 AM
in
Project Showcase
Hi Folks,
This is my first contribution to the community so I hope someone finds it helpful.
I took the plunge and bought a Netduino plus from Little Bird in Australia.
I also bought the DFRobot LCD Keypad Shield at the same time so I would have something to display data on and some keys for control. I didn't select very carefully as it uses 8 pins to acheive this and there may have been better choices.
On the whole I am happy with it but because it is designed for Arduino it requires some modification for it to work with Netduino.
The module is the DFRobot DFR0009
http://www.dfrobot.c...t&product_id=51
For those not familiar with this shield it connects to a common 16x2 LCD module using a 4-bit interface. With enable and reset that brings the pin count to 6 pins for the LCD.
The backlight is driven by a 7th pin via a transistor. This is a PWM pin which simplifies adjusting backlight intensity.
So far so good.
The keypad is where the mod is required. It consists of 5 buttons labeled select, up, down, left,right.
The buttons tap into a string of resistors and pull the Analog input pin0 to different voltages depending on which button is pushed. The output is designed for Arduino so the analog levels for the buttons are spaced between 0 and 5v.
The voltage output when the left button is pressed and when no button is pressed is over 3.3v so it will register as 1024.
My first attempt to mod the shield was to pull out the 5v pin and bridge the Vcc to the 3.3V pin. This fixed the keypad OK but the LCD contrast was no good. The text was just readable with the contrast pot at one end of its range. The HD44780 can run on 3.3v but not this LCD module.
So I reversed that mod and looked for another way.
In the end I settled on removing the 2k resistor at the top of the chain that links between 5v and the analog pin0
The 2k resistor is an SMD chip resistor thet is located under the LCD module but it can easily be reached with a soldering iron.
Then I made a new connection with a 1500ohm resistor between 3.3v and the analog pin0.
The resistance change to 1500ohms helps to maintain the even separation of the voltages generated.
With the new setup the switch presses theoretically generate the following ADC values, mine were all within a few counts of these.
None=1024
Select=796
Left=578
Down=397
Up=184
Right=0
If you are coding the thresholds to check against are 90,290,490,690 and 910.
Check the sample code for Arduino to see how it's done.
Here are some photos that should make things clearer.
This one shows the "202" resistor to be removed

This shows where to add the 1500R resistor

This shows the picture from the DFRObot website. My unit looks different but it still functions the same.

The library I used was the microliquidcrystal library
The LCD provider settings are below
This is my first contribution to the community so I hope someone finds it helpful.
I took the plunge and bought a Netduino plus from Little Bird in Australia.
I also bought the DFRobot LCD Keypad Shield at the same time so I would have something to display data on and some keys for control. I didn't select very carefully as it uses 8 pins to acheive this and there may have been better choices.
On the whole I am happy with it but because it is designed for Arduino it requires some modification for it to work with Netduino.
The module is the DFRobot DFR0009
http://www.dfrobot.c...t&product_id=51
For those not familiar with this shield it connects to a common 16x2 LCD module using a 4-bit interface. With enable and reset that brings the pin count to 6 pins for the LCD.
The backlight is driven by a 7th pin via a transistor. This is a PWM pin which simplifies adjusting backlight intensity.
So far so good.
The keypad is where the mod is required. It consists of 5 buttons labeled select, up, down, left,right.
The buttons tap into a string of resistors and pull the Analog input pin0 to different voltages depending on which button is pushed. The output is designed for Arduino so the analog levels for the buttons are spaced between 0 and 5v.
The voltage output when the left button is pressed and when no button is pressed is over 3.3v so it will register as 1024.
My first attempt to mod the shield was to pull out the 5v pin and bridge the Vcc to the 3.3V pin. This fixed the keypad OK but the LCD contrast was no good. The text was just readable with the contrast pot at one end of its range. The HD44780 can run on 3.3v but not this LCD module.
So I reversed that mod and looked for another way.
In the end I settled on removing the 2k resistor at the top of the chain that links between 5v and the analog pin0
The 2k resistor is an SMD chip resistor thet is located under the LCD module but it can easily be reached with a soldering iron.
Then I made a new connection with a 1500ohm resistor between 3.3v and the analog pin0.
The resistance change to 1500ohms helps to maintain the even separation of the voltages generated.
With the new setup the switch presses theoretically generate the following ADC values, mine were all within a few counts of these.
None=1024
Select=796
Left=578
Down=397
Up=184
Right=0
If you are coding the thresholds to check against are 90,290,490,690 and 910.
Check the sample code for Arduino to see how it's done.
Here are some photos that should make things clearer.
This one shows the "202" resistor to be removed

This shows where to add the 1500R resistor

This shows the picture from the DFRObot website. My unit looks different but it still functions the same.

The library I used was the microliquidcrystal library
The LCD provider settings are below
//Keypad connected to Analog pin 0
AnalogInput keys = new AnalogInput(Pins.GPIO_PIN_A0);
//backlight connected to D10
// create the transfer provider
// Initialize the library with the numbers of the interface pins
PWM backlight = new PWM(Pins.GPIO_PIN_D10);
var lcdProvider = new GpioLcdTransferProvider(Pins.GPIO_PIN_D8, Pins.GPIO_PIN_D9,
Pins.GPIO_PIN_D4, Pins.GPIO_PIN_D5, Pins.GPIO_PIN_D6, Pins.GPIO_PIN_D7);


